
- //SENSOR DE DISTANCIA AMB DISPLAY
- //
- //http://zygzax.com/webproyectos/websensorus-100/
- #include <LiquidCrystal.h>
- LiquidCrystal lcd(12, 11, 5, 4, 3, 2);
- const int trigger=10;
- const int echo=13;
- float distance;
- void setup(){
- Serial.begin(9600);
- pinMode(trigger,OUTPUT);
- pinMode(echo,INPUT);
- lcd.begin(16,2);
- }
- void loop(){
- //Inicializamos el sensor
- digitalWrite(trigger,LOW);
- delayMicroseconds(5);
- // Comenzamos las mediciones
- // Enviamos una señal activando la salida trigger durante 10 microsegundos
- digitalWrite(trigger,HIGH);
- delayMicroseconds(10);
- digitalWrite(trigger,LOW);
- // Adquirimos los datos y convertimos la medida a metros
- distance=pulseIn(echo,HIGH); // Medimos el ancho del pulso
- // (Cuando la lectura del pin sea HIGH medira
- // el tiempo que transcurre hasta que sea LOW
- distance=distance*0.0001657;
- // Enviamos los datos medidos a traves del puerto serie y al display LCD
- Serial.println(distance);
- lcd.setCursor(0,0);
- lcd.print(distance);
- delay(100);
- }
martes, 7 de octubre de 2014
Sensor de Distancia US-020
lunes, 23 de junio de 2014
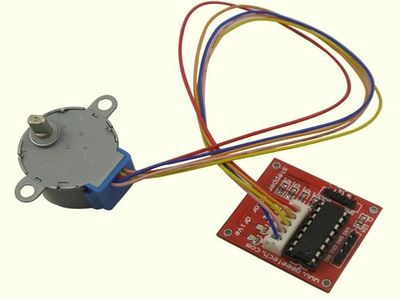
Arduino - Motor Paso a Paso Bipolar
Motor Paso a Paso Bipolar
Codigo ejemplo:
Codigo ejemplo:
int Pin0 = 8;
int Pin1 = 9;
int Pin2 = 10;
int Pin3 = 11;
int _step = 0;
int pases=0;
boolean dir = false;// change the direction of the motor
void setup()
{
pinMode(Pin0, OUTPUT);
pinMode(Pin1, OUTPUT);
pinMode(Pin2, OUTPUT);
pinMode(Pin3, OUTPUT);
Serial.begin(9600);
}
void loop()
{
for(pases=0;pases<4075;pases++){
pas();
delay(1); // change this delay to control the speed of your
stepper, delay to 100 you can see the signal LEDs blinking.
}
delay(500);
}
void pas()
{
switch(_step){
case 0:
digitalWrite(Pin0, LOW);
digitalWrite(Pin1, LOW);
digitalWrite(Pin2, LOW);
digitalWrite(Pin3, HIGH);
break;
case 1:
digitalWrite(Pin0, LOW);
digitalWrite(Pin1, LOW);
digitalWrite(Pin2, HIGH);
digitalWrite(Pin3, HIGH);
break;
case 2:
digitalWrite(Pin0, LOW);
digitalWrite(Pin1, LOW);
digitalWrite(Pin2, HIGH);
digitalWrite(Pin3, LOW);
break;
case 3:
digitalWrite(Pin0, LOW);
digitalWrite(Pin1, HIGH);
digitalWrite(Pin2, HIGH);
digitalWrite(Pin3, LOW);
break;
case 4:
digitalWrite(Pin0, LOW);
digitalWrite(Pin1, HIGH);
digitalWrite(Pin2, LOW);
digitalWrite(Pin3, LOW);
break;
case 5:
digitalWrite(Pin0, HIGH);
digitalWrite(Pin1, HIGH);
digitalWrite(Pin2, LOW);
digitalWrite(Pin3, LOW);
break;
case 6:
digitalWrite(Pin0, HIGH);
digitalWrite(Pin1, LOW);
digitalWrite(Pin2, LOW);
digitalWrite(Pin3, LOW);
break;
case 7:
digitalWrite(Pin0, HIGH);
digitalWrite(Pin1, LOW);
digitalWrite(Pin2, LOW);
digitalWrite(Pin3, HIGH);
break;
default:
digitalWrite(Pin0, LOW);
digitalWrite(Pin1, LOW);
digitalWrite(Pin2, LOW);
digitalWrite(Pin3, LOW);
break;
}
if(dir){ _step++; ; }else{ _step--; }
if(_step>7){ _step=0; }
if(_step<0){ _step=7; }
}
miércoles, 18 de junio de 2014
Pickit 2 Clone
http://tecbolivia.com/index.php/articulos-y-tutoriales-microcontroladores/19-icsp-como-usar-qprogramacion-serial-en-circuitoq-con-microcontroladores-pic
https://sites.google.com/site/electronicadidacta/home
http://xpiolx.no-ip.org/v0/pickit2clone.html (Pickit2 clone 3,3-5v)
http://microembebidos.wordpress.com/2012/02/13/tutorial-pinguino-construye-tu-placa-pinguino-core-
pic18f4550/



https://sites.google.com/site/electronicadidacta/home
http://xpiolx.no-ip.org/v0/pickit2clone.html (Pickit2 clone 3,3-5v)
http://microembebidos.wordpress.com/2012/02/13/tutorial-pinguino-construye-tu-placa-pinguino-core-
pic18f4550/
martes, 17 de junio de 2014
lunes, 16 de junio de 2014

Adaptador Serial / PIC
http://www.pablin.com.ar/electron/circuito/mc/ttl232/index.htm
Conversor RS232 a TTL sin MAX232
Todos sabemos que a la hora de conectar un PIC a la PC utilizar el MAX232 es el paso mas directo y fácil. Sólo cinco capacitores y éste integrado estará funcionando bien. Pero tomando en cuenta que hoy por hoy un MAX232 puede salirnos incluso mas caro que el mismísimo PICmicro decidimos desarrollar una alternativa válida que lo reemplace.
 |  |  |
El circuito de arriba utiliza la propia corriente del puerto COM de la PC para generar los símbolos del RS232. Los pines marcados como TxD, RxD y Gnd corresponden al conector RS232 de la PC (ver conexionado) mientras que los pines marcados como RD y TD van directamente a microcontrolador. Podemos observar el pinout de los transistores.
Este tipo de interface es muy vista en mouses o elementos de control de punteo en PC. Los puntos de alimentación son de 5V (los mismos que del micro).
Suscribirse a:
Comentarios
(
Atom
)